Diferentes tipos de representaciones gráficas 2D y 3D: Boceto, Alzado, Planta y perfil, perspectiva isométrica y perspectiva caballera. Pincha en el índice para ver la información que necesites:
0:00 Introducción 1:13 Boceto inicial a mano alzada 1:47 Dibujo de Vistas – alzado, planta y perfil 2:14 Explicación vistas con colores 3:05 Medidas de las vistas 3:29 Resumen vistas 3:50 Explicación con pieza real 6:32 Perspectiva isométrica 8:01 Perspectiva caballera 9:33 Infografía resultado 10:07 Reflexiones finales
Y aquí el resumen visual que os puede servir para repasar:
Y una colección de piezas en 3D para poder visualizarlas, girarlas y practicar:
Video tutorial que describe cómo realizar varias de las tareas comunes de formateo en un Word, desde índices automáticos, pasando por encabezado y pie de página e inserciones de objetos y llegando a bibliografía. Para ello se utiliza Word online (Microsoft 365) y Word instalado (v2016).
0:00 Descripción y uso de este tutorial 1:55 Word 365- https://www.office.com/ 2:00 Word 365- Esqueleto de programación didáctica 3:26 Word 365- Modo claro y organización con saltos de página 4:05 Word 365- Estilos en títulos 4:44 Word 365- Tabla de contenido (Índice automático) 5:18 Word 365- Mostrar y ocultar caracteres (antígrafos y saltos de página) 5:33 Word 365- Encabezado con estilo 6:40 Word 365- Pie de página y numeración 7:27 Word 365- Portada con formato 8:23 Word 365- Descarga de pdf y resumen de lo realizado 9:28 Word 2016- Introducción y salto de sección 10:15 Word 2016- Insertar Portada 11:22 Word 2016- Añadir página horizontal 12:17 Word 2016- Corrección de numeración con saltos de sección 13:35 Word 2016- Insertar imágenes 14:22 Word 2016- Insertar gráficos 15:37 Word 2016- Insertar ecuaciones y su editor 16:44 Word 2016- Hiperenlaces y marcas de documento 18:00 Word 2016- Bibliografía – Fuentes y citas 20:26 Word 2016- Notas en pie de página 21:11 Word 2016- Resumen de lo realizado 22:07 Reflexión final
Práctica de control remoto de un robot con dos placas Micro:bit para Educación Secundaria. El robot es el Cutebot y la placa del mando autoalimentadas con pilas. Desde cómo configurar del mando a distancia, del envío de señales y la recepción de las mismas, para luego dar fuerza a los motores y guiar del movimiento del Cutebot. Pincha en el índice para ver tu parte deseada:
0:00 Introducción 1:11 Explicación gráfica conceptual 3:39 Código del Mando – Envío de radio 4:20 Código del Mando – Izquierda y Derecha 4:53 Código del Mando – Parada 5:11 Código del Mando – Adelante-Atrás 5:49 Código del Mando – Acelerómetro en Y 7:17 Código del Mando – Regulación con K 8:18 Mando – Resumen del control 9:30 Código del Robot – Receptor de radio 10:49 Código del Robot – Control con R1 y R2 12:22 Código del Robot – Sensibilidad del movimiento 13:32 Código del Robot – Velocidad vs Giro 14:25 Código del Robot – Display movimiento 16:06 Código del Robot – Control motores 16:40 Código del Robot – Ajuste de velocidad 17:40 Demostración de movimiento 18:20 Reflexiones finales
Puedes utilizar este resumen para entender la explicación general del control remoto con ambas placas micro:bit:
Descripción de todos los elementos de telecomunicaciones de una vivienda. Es la explicación con un resumen visual guiado en el vídeo de las instalaciones de telecomunicaciones en viviendas. Esencial de aprender por los alumnos para comprender el mundo de las telecomunicaciones y sus proveedores según el tipo de señal.
0:00 Introducción 0:44 Concepto de transmisión 2:27 TDT – Televisión Digital Terrestre 3:10 TDT – Amplificador de mástil 3:51 Cable coaxial – F.A. 4:38 Derivador – Resistencia 6:21 Radio – AM y FM 7:40 Teléfono – Concepto 7:56 Teléfono – PTR 8:44 Teléfono – Cableado 9:18 Teléfono – Inalámbrico 10:02 Internet – Proveedor de Servicios de Internet 10:25 Cable FO – Fibra Óptica 11:04 Router – Conexiones 11:54 Router – entrada del ISP 12:29 Router – WiFi 13:14 Resumen visual para repasar 13:31 Reflexiones finales
Y aquí el resumen visual que os puede servir para repasar:
Bienvenidos a todos los que os iniciáis en el mundo de la Inteligencia Artificial. En este apartado os presento mi propuesta de Aprender sobre IA mediante la utilización de IA: Entender los servidores de procesado, entender los conceptos básicos de la generación de imágenes, de forma práctica más que una sesión teórica. Tres prácticas con tres tipos de servidor: Primera práctica con google Colab (ficheros al final de este post), segunda con una web (link al final de este post) y una tercera práctica con Stable Diffusion de forma completa en local para ver las posibilidades actuales. Espero que este aprendizaje sea de vuestro interés:
0:00 Introducción 0:22 Tipos de servidor de procesado 2:11 Prácticas según lo comentado 2:44 Práctica 1 – COLAB – SD 1.5 6:26 Práctica 2 – Web huggingface – SD 2.1 7:43 Práctica 3 – SD Local – Photorealism 8:04 Práctica 3 – SD Local – ControlNet – Canny 8:52 Práctica 3 – SD Local – Inpainting 9:50 Práctica 3 – SD Local – Upscale ESRGAN 10:10 Resumen práctica 3 10:27 Reflexiones final
Bienvenidos a todos los que os iniciáis en el mundo de la robótica educativa. En este apartado os presento un tutorial inicial con el robot Cutebot y la placa Micro:bit. En este se comienza con una descripción de las partes del roboto y posteriormente dos prácticas sencillas a modo de ejemplo de programación y de envío del programa a la Micro:bit. Espero que este aprendizaje sea de vuestro interés:
0:00 Introducción 1:37 Descripción Cutebot – Encendido 2:02 Descripción Cutebot – Pines e IR 2:15 Descripción Cutebot – Motores CC 2:47 Descripción Cutebot – Alimentación y Slot 3:21 Descripción Cutebot – LED RGB, IIC y SR04 3:51 Descripción sensor ultrasonidos 4:19 Descripción Cutebot – LED y sensores guiado 5:04 Descripción giro Cutebot 5:21 Software – Makecode 5:42 Cargar extensión Cutebot 6:12 Práctica 1 – luces y motores 8:24 Práctica 1 – Download y test 9:19 Práctica 2 – Ultrasonidos 10:48 Práctica 2 – Download y test 11:44 Práctica 2 – Demo darkmode 12:10 Reflexiones finales
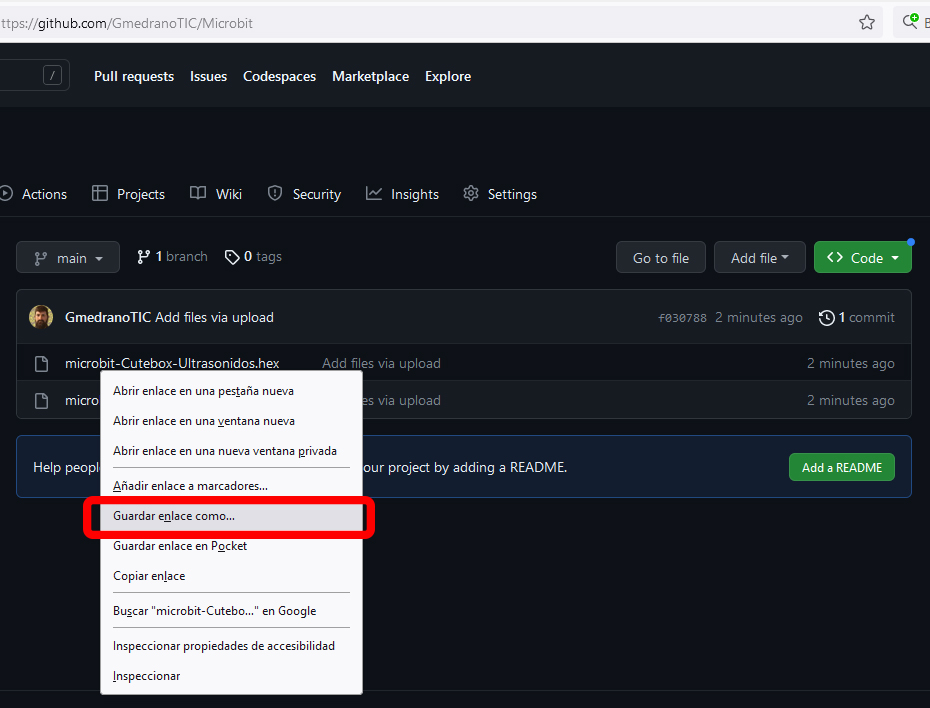
Puedes descargar los dos archivos .hex que se tratan en la práctica en https://github.com/GmedranoTIC/Microbit, directamente seleccionando el archivo y pinchando con el botón derecho, «guardar enlace como»:
Y si quieres más nivel, programa tu propio control remoto para tu coche-robot de juguete: